Papers·1개월 전
StressDream — 텍스트로 확산 세계모델의 상상을 위험 시나리오로 유도, 정책 평가 강화
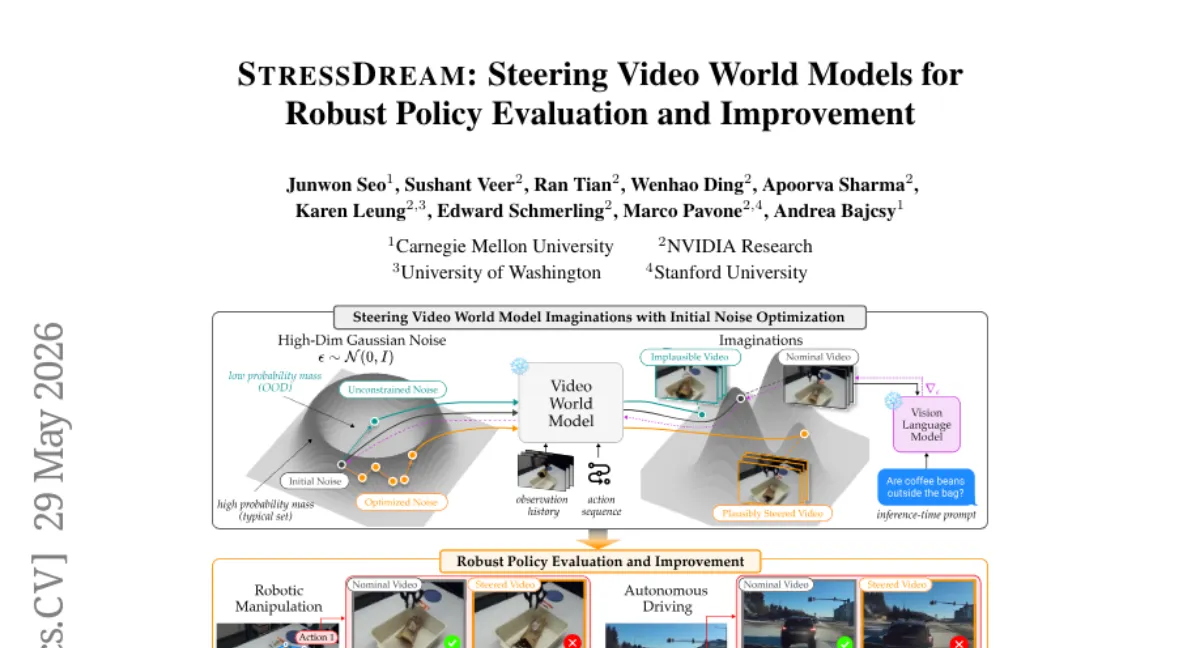
MIT·Stanford 팀이 확산 기반 비디오 세계모델의 초기 노이즈를 최적화해, 추론 시 텍스트로 지정한 고영향 시나리오(예: 작업 실패)를 사실적으로 상상하게 하는 StressDream을 제안했습니다. VLM의 의미적 그래디언트와 OOD 방지 목적함수를 결합해, 자율주행·로봇 조작 태스크에서 기존 대비 위험 상황 탐지율을 높였습니다. 단, diffusion 모델의 추론 비용이 추가로 든다는 점은 감안해야 합니다.
확산 세계모델의 상상을 텍스트 조건으로 고영향 시나리오로 유도해, 정책 평가의 견고성을 높인 방법입니다.
핵심 결론
- 태스크 — 자율주행 및 로봇 조작 세계모델에서, 텍스트로 지정한 위험 상황(충돌, 물체 낙하 등)을 사실적으로 생성.
- 개선폭 — 기존 샘플링 대비 목표 시나리오 재현율이 크게 향상 — 구체 수치는 논문 내 정량 평가 참조.
방법
- 핵심 아이디어 — 확산 모델의 초기 노이즈를 최적화하여, 추론 시 텍스트로 주어진 고영향 결과를 생성하도록 유도.
- 두 가지 목적함수 — VLM이 생성된 비디오를 보고 의미적 그래디언트를 제공하는 semantic objective와, 노이즈가 OOD로 빠지지 않게 막는 plausibility objective를 함께 사용.
한계·조건
- 비용 — 초기 노이즈 최적화에 추가 추론 단계가 필요해, 실시간 적용에는 무리가 있을 수 있습니다.
- 범위 — 현재는 자율주행과 로봇 조작 두 도메인에서만 검증 — 다른 도메인 일반화는 미확인.
- 코드 — GitHub 공개 예정 (현재는 프로젝트 페이지에서 비디오 결과만 확인 가능).
편집자 한 줄
VLM을 확산 모델의 그래디언트 소스로 활용한 설계가 깔끔합니다. 다만 최적화 비용이 만만치 않아, 실제 배포까지는 추가 효율화가 필요해 보입니다.
- #world-models
- #diffusion
- #policy-evaluation
- #robustness
- #mit
Junwon Seo