Papers·1개월 전
UC Berkeley, 놀이를 통해 스킬을 학습하는 로봇 에이전트 RATs — LIBERO-PRO 20.6%p 향상
UC Berkeley 팀이 놀이(play)를 통해 코드 기반 스킬을 사전 학습하는 로봇 에이전트 RATs를 제안했습니다. RATs는 자발적으로 탐색 과제를 생성하고, 실행하며, 실패 시 피드백을 통해 스킬 라이브러리를 구축합니다. LIBERO-PRO와 MolmoSpaces에서 각각 20.6, 17.0%p의 성능 향상을 보였고, 학습된 스킬은 파인튜닝 없이 다른 에이전트에 이식 가능합니다.
UC Berkeley 연구진이 로봇이 놀이를 통해 스스로 스킬을 학습하는 프레임워크 RATs를 공개했습니다.
핵심 결론
- 성능 — LIBERO-PRO에서 CaP-Agent0 대비 20.6%p, MolmoSpaces에서 17.0%p 향상.
- 전이 — 학습된 스킬 라이브러리를 다른 Code-as-Policy 에이전트에 컨텍스트로 주입만 해도 RoboSuite 8.9%p, 실제 환경 8.8%p 개선.
방법
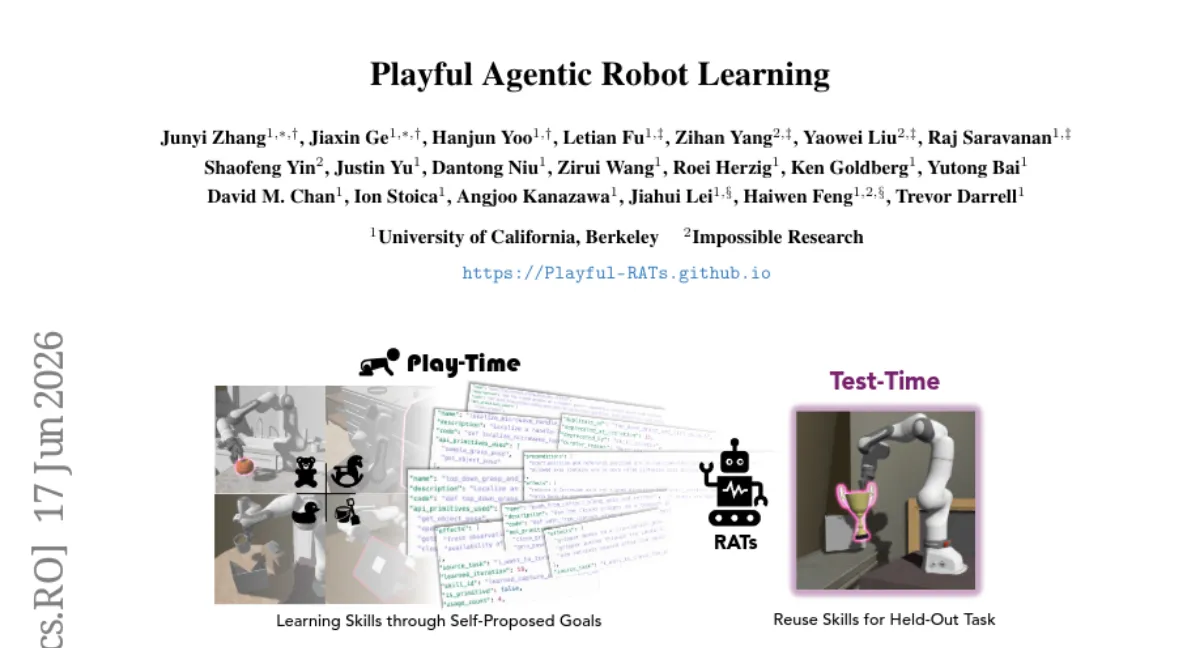
- 놀이 단계 — RATs는 스스로 탐색 과제를 제안하고, 코드 정책을 계획·실행하며, 중간 진행을 검증하고, 실패 시 단계별 피드백으로 재시도 후 성공한 실행을 코드 스킬 라이브러리로 저장.
- 테스트 시에는 이 라이브러리에서 관련 스킬을 검색해 새 과제 해결에 활용합니다.
한계·조건
- 환경 — 실험은 시뮬레이터(LIBERO-PRO, MolmoSpaces)와 제한된 실제 환경에서 수행.
- 코드 — 코드 공개 여부는 아직 명시되지 않았습니다.
편집자 한 줄
놀이를 통한 스킬 학습 아이디어는 직관적이면서도 효과적이네요. 다만 스킬 라이브러리의 확장성과 장기 유지보수 측면은 추가 검증이 필요해 보입니다.
- #robotics
- #code-as-policy
- #skill-learning
- #uc-berkeley
UC Berkeley