Papers·1개월 전
Columbia, 포토다이오드 4개로 평면 주행 추정 — VIO 대비 리소스 1/100 수준
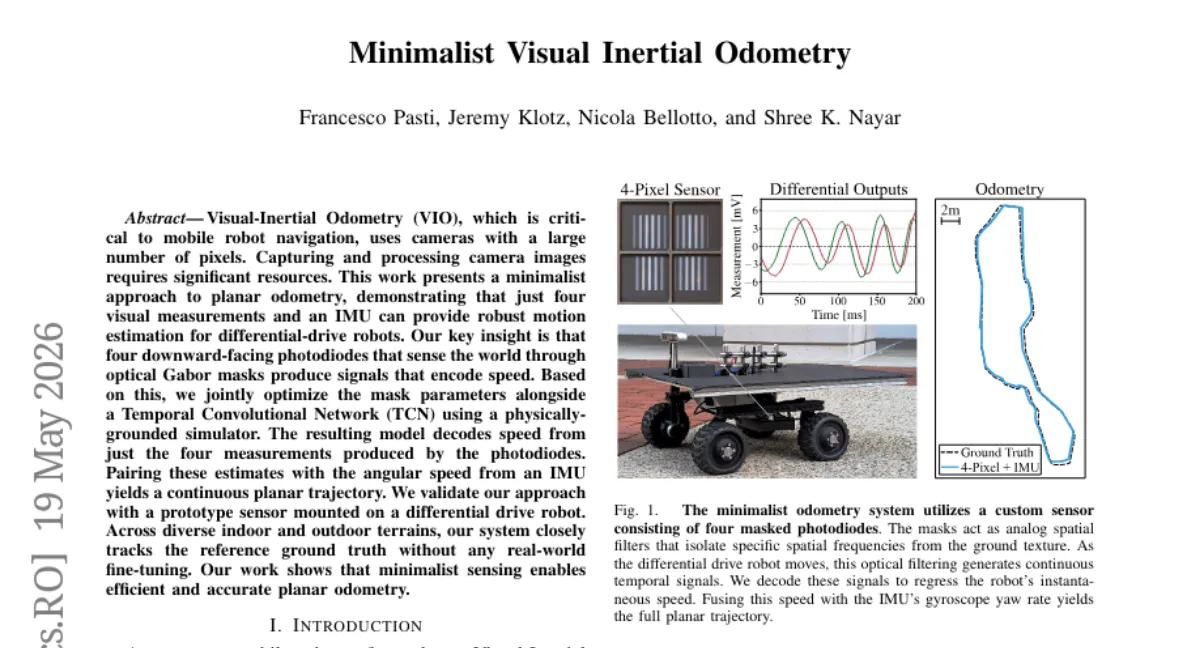
Columbia 대학 연구진이 4개의 광학 Gabor 마스크가 장착된 포토다이오드와 IMU만으로 differential-drive 로봇의 평면 궤적을 추정하는 방법을 제안했습니다. 마스크 파라미터와 Temporal Convolutional Network를 물리 기반 시뮬레이터에서 공동 최적화해 속도를 디코딩하며, 실내외 다양한 지형에서 실물 보정 없이 ground truth를 근접 추적했습니다. 카메라 기반 VIO 대비 센서 비용과 연산량을 극적으로 줄였지만, planar odometry에 특화되어 3차원 자세 추정은 불가능한 한계가 있습니다.
- #visual-inertial-odometry
- #minimalist-sensing
- #columbia
- #differential-drive
Columbia University