Papers·2개월 전
Fudan, 부분 관측 환경에서 통합 리스크 맵 학습 — Waymo 벤치 TTC 1.67배 개선
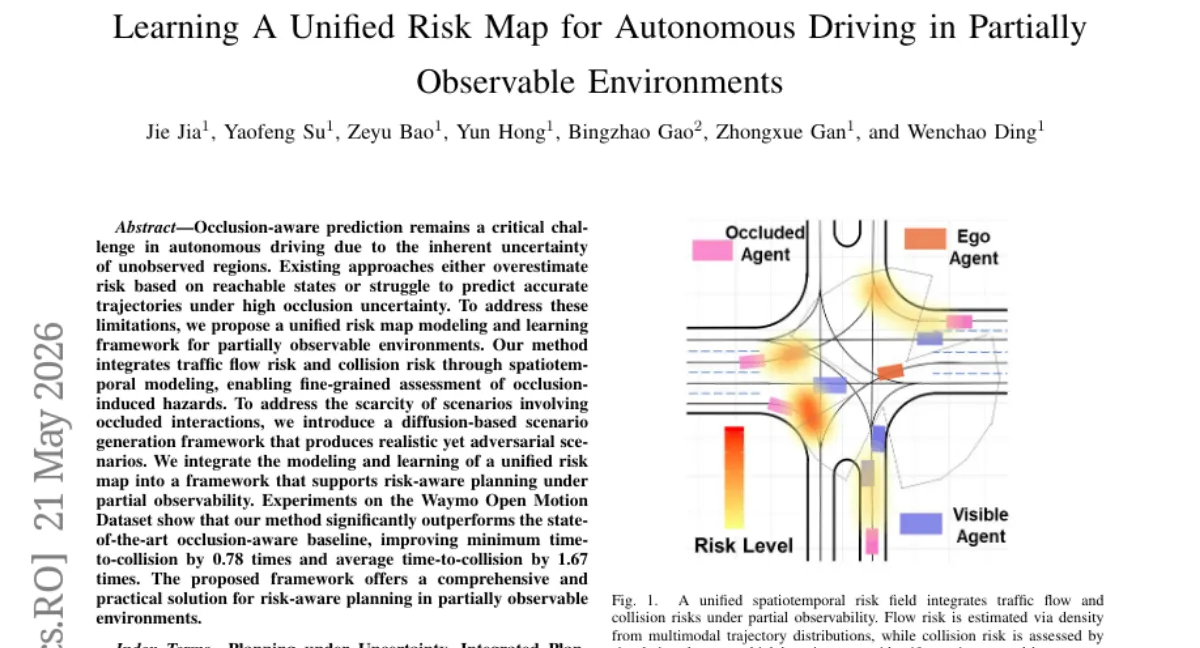
Fudan University 팀이 부분 관측 환경에서 교통 흐름 리스크와 충돌 리스크를 통합한 리스크 맵 학습 프레임워크를 제안했습니다. 기존 occlusion-aware baseline 대비 Waymo Open Motion Dataset에서 최소 TTC 0.78배, 평균 TTC 1.67배 개선을 달성했습니다. 핵심은 확산 기반 시나리오 생성으로 드문 occlusion 상호작용 데이터를 증강한 점입니다. 단, 벤치마크가 Waymo 단일 데이터셋에 국한되어 일반화 검증이 더 필요합니다.
Fudan University가 부분 관측 환경에서 리스크 맵을 학습하는 통합 프레임워크를 제안했습니다. 기존 접근 대비 TTC를 크게 개선했습니다.
핵심 결론
- 태스크 — 부분 관측 환경에서의 위험 인지 및 예측, Waymo Open Motion Dataset 평가.
- 개선폭 — 최소 TTC 0.78배, 평균 TTC 1.67배 향상 — 기존 occlusion-aware baseline 대비.
방법
- 통합 리스크 맵 — 교통 흐름 리스크와 충돌 리스크를 시공간 모델링으로 결합, occlusion으로 인한 위험을 세밀하게 평가합니다.
- 데이터 증강 — 확산 기반 시나리오 생성 프레임워크로 현실적이면서도 적대적인 occlusion 시나리오를 합성해 드문 상호작용 데이터 부족을 해결했습니다.
한계·조건
- 데이터셋 — Waymo 단일 데이터셋에서만 검증되어 다른 도시·환경에서의 일반화는 추가 실험이 필요합니다.
- 코드 — 논문에는 코드 공개 여부가 명시되지 않았습니다.
편집자 한 줄
확산 모델로 occlusion 시나리오를 생성하는 아이디어는 실용적이지만, 생성된 시나리오의 현실성과 다양성에 대한 추가 분석이 있으면 좋겠네요.
- #autonomous-driving
- #risk-map
- #occlusion
- #fudan
- #diffusion
Fudan University