Papers·1개월 전
Princeton, 로봇 물리 추론 벤치마크 KinDER 공개 — 25개 환경에서 기존 방법 대부분 실패
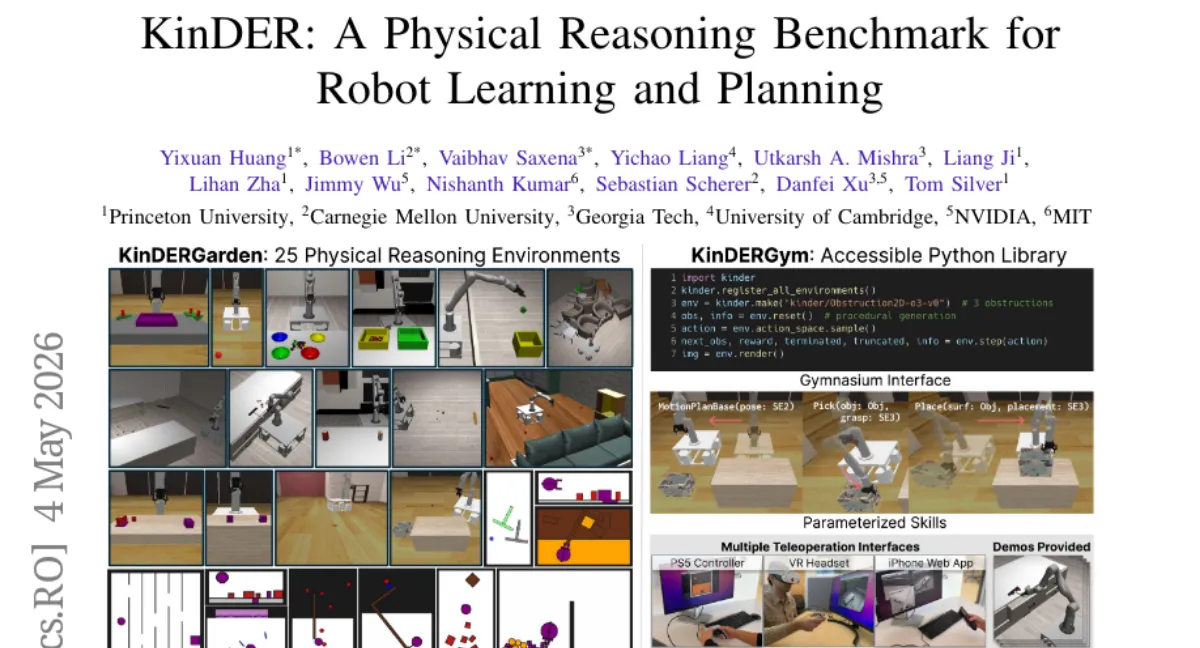
Princeton 대학이 로봇의 물리적 추론 능력을 평가하는 벤치마크 KinDER를 공개했습니다. 25개의 절차적 생성 환경으로 구성되며, 기본 공간 관계, 비파지 다중 객체 조작, 도구 사용, 조합 기하 제약, 동적 제약 등 5가지 핵심 과제를 다룹니다. 13개의 베이스라인(TAMP, 모방학습, 강화학습, 기반모델)을 평가한 결과 대부분의 환경에서 낮은 성능을 보여 현재 접근법의 한계를 드러냈습니다. 실제 로봇 실험도 포함되어 있으며, 코드와 환경이 완전히 오픈소스로 공개되었습니다.
- #robotics
- #benchmark
- #physical-reasoning
- #princeton
Princeton University