Papers·4일 전
PoLAR: 극좌표 구조로 전이 정도와 모드를 분리한 잠재 행동 사전학습 — 로봇 정책 성능 향상
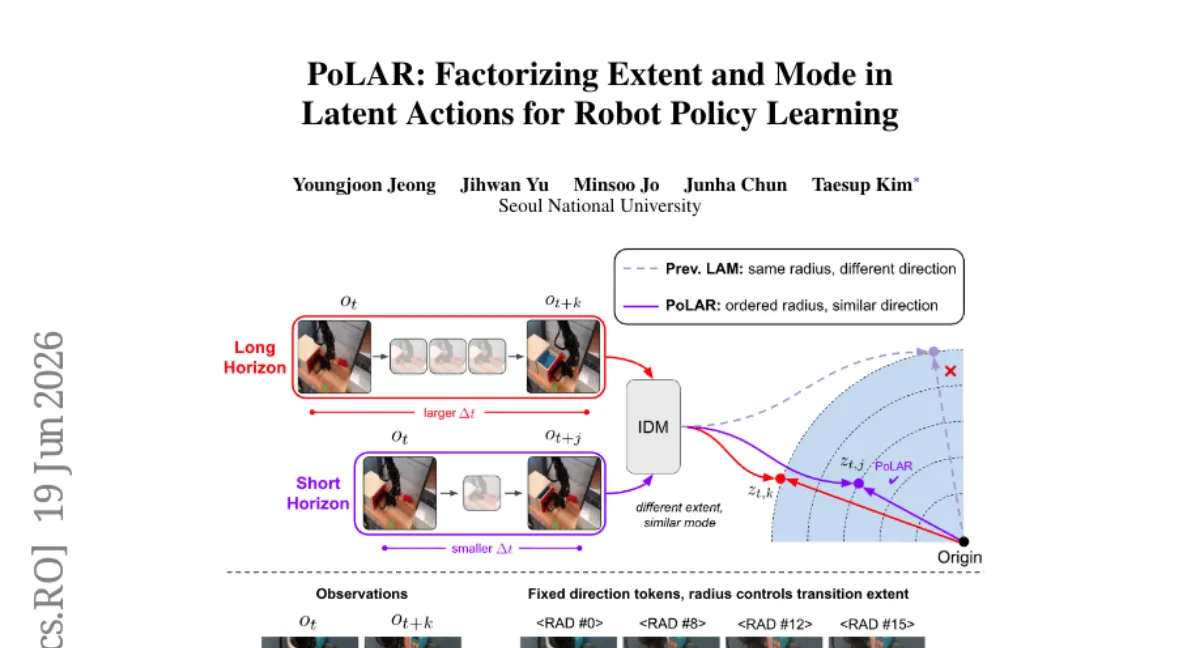
서울대 연구팀이 잠재 행동 공간에 극좌표 구조(PoLAR)를 도입해 전이 정도(radius)와 전이 모드(direction)를 분리하는 방법을 제안했습니다. 시간 간격을 전이 정도의 약한 프록시로 사용해 hyperbolic space에서 표현함으로써, 시뮬레이션 및 실제 로봇 실험에서 기존 잠재 행동 baseline과 사전학습 VLA 대비 downstream 정책 성능을 개선했습니다. 잠재 행동 공간의 기하학적 구조가 시각 사전학습의 전이에 중요함을 보여줍니다.
서울대 연구팀이 잠재 행동 공간에 극좌표 구조를 부여해 전이 정도와 모드를 분리하는 PoLAR를 제안, 로봇 정책 학습 성능을 높였습니다.
핵심 결론
- 성능 — 시뮬레이션 및 실제 로봇 실험에서 기존 잠재 행동 baseline과 사전학습 VLA 대비 downstream 정책 성능이 개선되었습니다.
- 핵심 통찰 — 잠재 행동 공간의 기하학적 구조(radial-direction)가 시각 사전학습의 전이에 중요한 설계 선택임을 입증했습니다.
방법
- 구조 — PoLAR는 잠재 행동을 radius(전이 정도)와 direction(전이 모드)으로 분해하는 극좌표 구조를 부과합니다.
- 약한 프록시 — 두 관측 사이의 시간 간격을 전이 정도의 약한 프록시로 사용해, 큰 시간 간격의 관측 쌍이 더 큰 radius를 갖도록 유도합니다.
- 공간 — 이 구조를 hyperbolic space에서 구현했는데, radius에 따라 부피가 팽창하는 특성이 다양한 전이 모드를 자연스럽게 수용합니다.
한계·조건
- 재현성 — 코드 및 모델 가중치 공개 여부는 abstract에 명시되지 않았습니다.
- 범위 — 실험은 특정 로봇 환경과 태스크에 국한되며, 일반화 가능성은 추가 검증이 필요합니다.
편집자 한 줄
잠재 행동 공간의 구조화 자체가 downstream 성능에 직접 영향을 준다는 점이 흥미롭습니다. 특히 hyperbolic space 선택이 단순한 수학적 트릭을 넘어 실제 로봇 실험에서 효과를 본 점이 인상적이네요.
- #latent-action
- #pretraining
- #robotics
- #seoul-national-university
Seoul National University