Papers·3개월 전
dWorldEval: 이산 확산 월드 모델로 로봇 정책 평가 확장 — LIBERO·RoboTwin 에서 기존 대비 월등
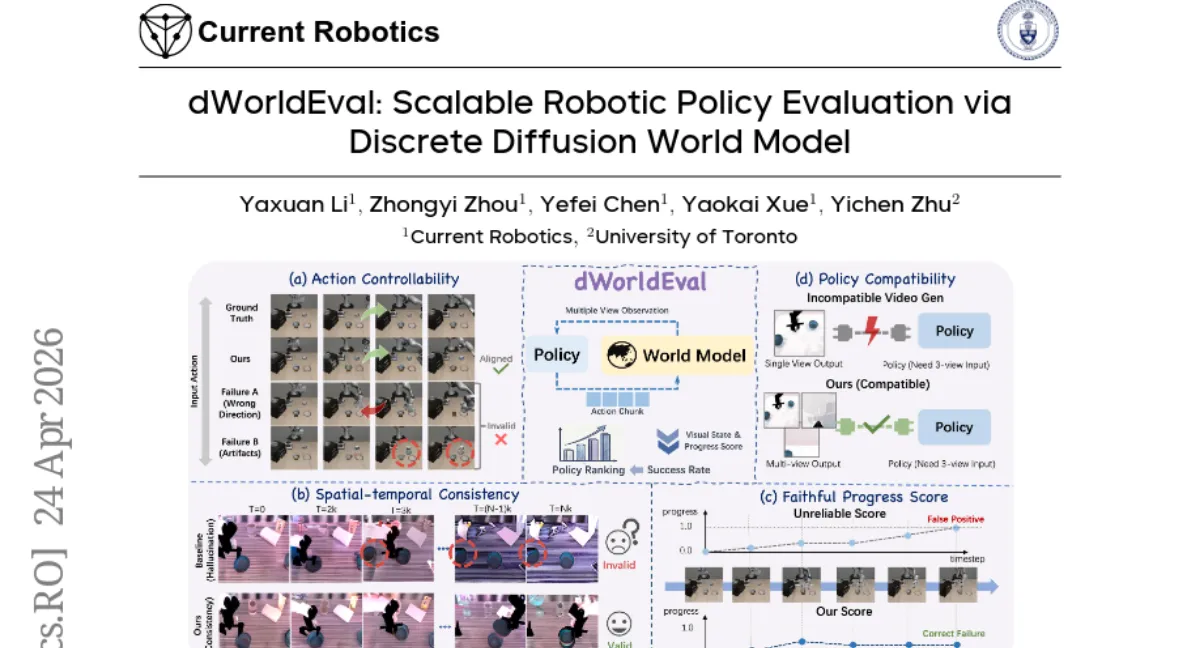
로봇 정책 평가를 수천 환경·태스크로 확장하기 어렵다는 문제를 해결하기 위해, discrete diffusion world model 을 평가 프록시로 사용하는 dWorldEval 이 제안됐습니다. 비전·언어·액션을 unified token space 로 매핑하고 transformer 기반 denoising network 로 처리하며, sparse keyframe memory 로 시공간 일관성을 유지하고 progress token 으로 태스크 완료도를 자동 판단합니다. LIBERO, RoboTwin, 실제 로봇 태스크에서 WorldEval 등 기존 방법을 크게 앞질렀지만, diffusion sampling 이 inference cost 를 높이는 점은 한계입니다.
- #robotics
- #world-model
- #diffusion
- #evaluation
- #transformer
Yaxuan Li