Papers·1개월 전
RoboStressBench: 물리적 시각 스트레스로 VLM 내구성 평가 — 4차원 분해로 실패 모드 진단
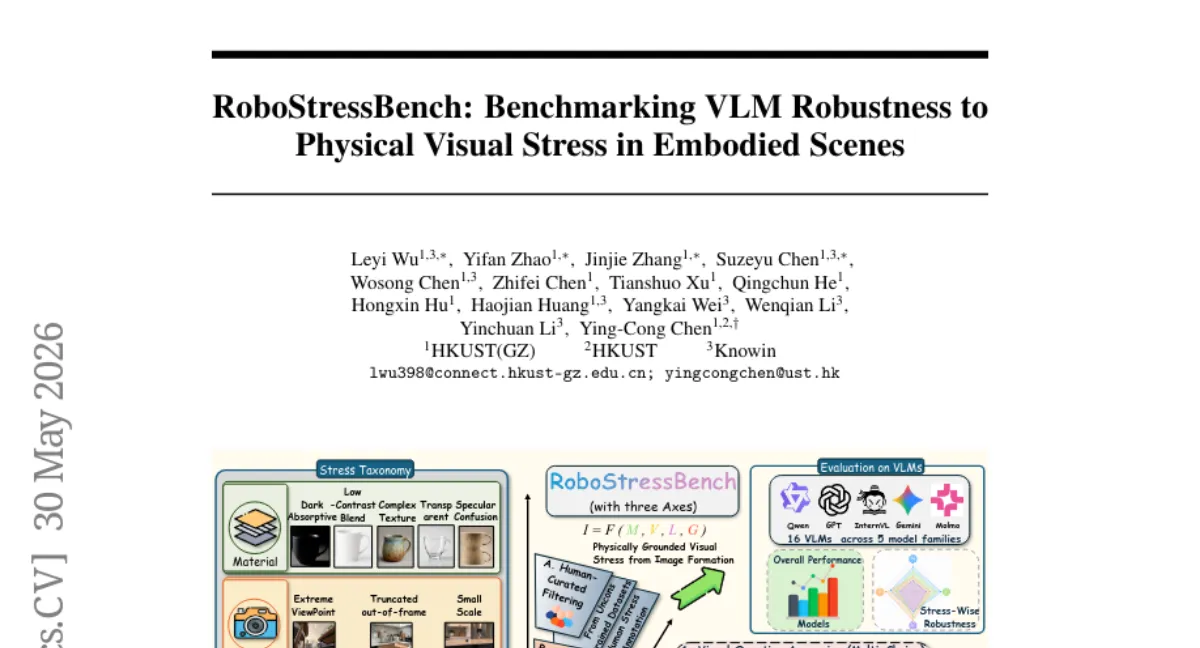
RoboStressBench 팀이 VLM의 실제 환경 시각 스트레스 내구성을 평가하는 벤치마크를 공개했습니다. 물리적 렌더링 방정식에서 영감을 받아 시각 스트레스를 재질(M), 시점(V), 조명(L), 기하(G) 4차원으로 분해해, 기존 벤치마크가 놓친 현실적 스트레스를 포괄합니다. 최신 VLM 평가 결과, 각 차원이 인식·추론·계획 능력을 차별적으로 저하시키며, 단순 평균 정확도로는 가려지는 실패 모드가 드러났습니다. 스트레스 인식 에이전트 솔버도 함께 제안했지만, 고스트레스 시나리오에서만 효과가 확인된 점이 한계입니다.
VLM의 실제 환경 내구성을 물리적 스트레스 차원에서 진단하는 벤치마크가 나왔습니다.
핵심 결론
- 벤치마크 — RoboStressBench는 재질·시점·조명·기하 4차원으로 시각 스트레스를 분해해 VLM의 인식·추론·계획 능력을 평가합니다.
- 발견 — 각 스트레스 차원이 서로 다른 능력을 저하시키며, aggregate accuracy 로는 가려지는 실패 모드가 존재합니다.
방법
- 물리적 기반 — 물리적 렌더링 방정식에서 영감을 받아 스트레스를 4차원으로 정의, 실제 환경에서 발생하는 다양한 스트레스를 포괄합니다.
- 데이터 — 각 차원별로 통제된 변형을 가한 이미지 세트를 구축, VLM의 인식·추론·계획 능력을 측정합니다.
- 솔버 — 스트레스 인식 에이전트 솔버가 시각 스트레스를 탐지하고, 추론 전에 이미지 편집 기술을 호출해 내구성을 높입니다.
한계·조건
- 범위 — 벤치마크는 정적 이미지 기반이며, 동적 환경이나 연속적 스트레스는 아직 다루지 않습니다.
- 솔버 효과 — 제안된 솔버는 고스트레스 시나리오에서만 유의미한 개선을 보였고, 저스트레스에서는 오히려 오버헤드가 발생할 수 있습니다.
- 코드 — 데이터셋과 평가 코드는 GitHub에 공개 예정이나, 현재는 논문과 데모만 확인 가능합니다.
편집자 한 줄
물리적 스트레스를 체계적으로 분해한 점이 인상적입니다. 다만 실제 로봇 환경에서의 동적 스트레스까지 확장될지는 지켜볼 점입니다.
- #vlm
- #robustness
- #benchmark
- #embodied-ai
RoboStressBench Team