Papers·1개월 전
ActiveMimic — 사람 동영상으로 로봇 사전학습, 능동적 시점 행동 학습으로 로봇 데이터 수준 성능 달성
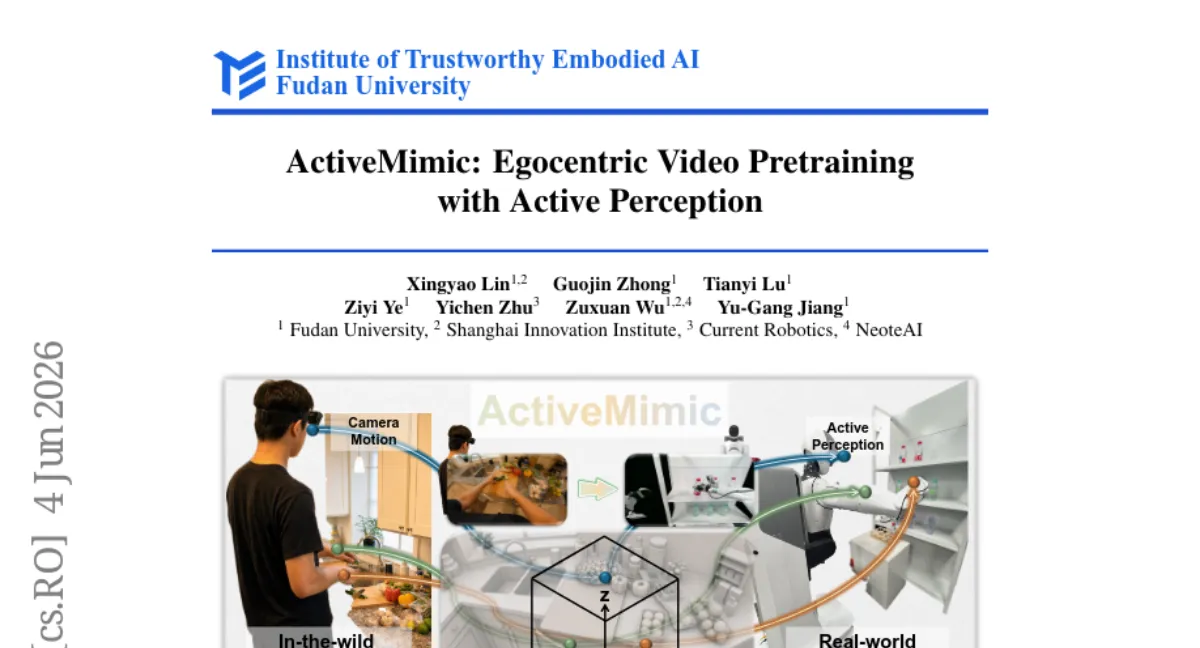
MIT CSAIL 연구팀이 사람의 1인칭 동영상에서 능동적 시점 행동(active perception)을 복원해 로봇 사전학습 성능을 로봇 데이터 수준으로 끌어올린 ActiveMimic을 공개했습니다. 단일 RGB 카메라로 손목과 카메라 궤적을 동기화하고 시점 변화를 행동으로 모델링한 점이 핵심입니다. 실제 로봇 실험에서 사람 동영상 기반 기존 방법을 일관되게 앞질렀으며, 능동적 시점 능력이 로봇 미세조정이 아닌 사전학습 단계에서 기인함을 확인했습니다.
MIT CSAIL 팀이 사람의 1인칭 동영상에서 능동적 시점 행동을 복원해 로봇 사전학습 성능을 로봇 데이터 수준으로 끌어올렸습니다.
핵심 결론
- 태스크 — 로봇 사전학습 — 사람의 egocentric 동영상(1인칭)을 활용해 로봇 조작 정책을 학습.
- 성능 — 실제 로봇 실험에서 사람 동영상 기존 방법 대비 일관되게 우수했으며, 로봇 데이터로 사전학습한 SOTA 모델과 동등한 성능.
- 핵심 발견 — 능동적 시점 능력은 로봇 미세조정이 아닌 egocentric 동영상 사전학습 단계에서 획득됨을 실험적으로 입증.
방법
- 동기화 — 단일 body-worn RGB 카메라로부터 손목과 카메라 궤적을 동시에 복원, 시점 변화를 행동으로 모델링.
- 프레임워크 — ActiveMimic은 능동적 시점 행동(active perception)을 별도 행동 공간으로 학습하고, 조작 정책과 공동으로 사전학습.
- 기존 방법이 카메라 움직임을 노이즈로 처리한 반면, 이를 유용한 신호로 전환한 점이 차별점입니다.
한계·조건
- 데이터 — 사전학습에 사용한 egocentric 동영상은 EPIC-KITCHENS 등 공개 데이터셋이며, 로봇 환경과의 도메인 차이는 여전히 존재.
- 재현성 — 코드와 모델 가중치는 공개 예정 — 현재는 논문과 supplementary만 열람 가능.
- 계산량 — 궤적 복원 및 공동 학습 과정이 추가되어 기존 단순 복제 학습보다 학습 비용이 증가할 수 있습니다.
편집자 한 줄
사람 동영상의 시점 변화를 '노이즈'가 아닌 '행동'으로 재정의한 발상이 깔끔합니다. 로봇 데이터 수집 비용을 낮출 실마리로 보여 한 번 봐둘 만합니다.
- #pretraining
- #robotics
- #egocentric-video
- #active-perception
- #mit
Xingyao Lin