Papers·1개월 전
AR-VLA: 독립형 AR Action Expert 로 연속적·맥락 인식 로봇 동작 생성 — 기존 VLA 대비 성공률 유지하며 궤적 평활도 개선
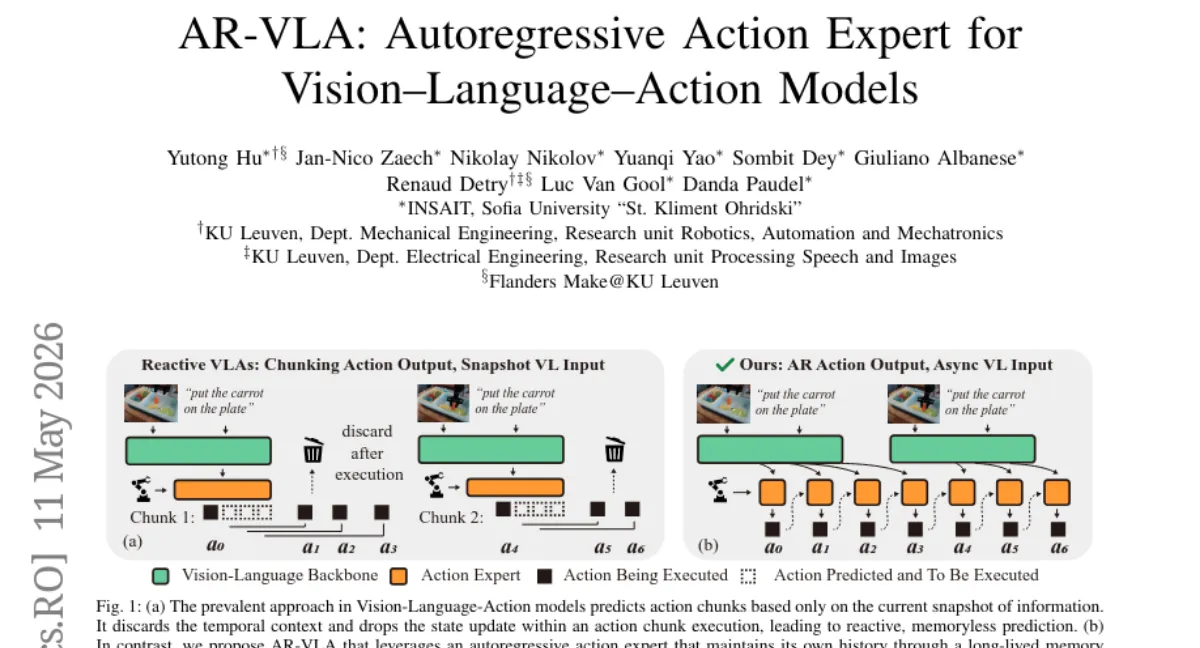
INSATI 팀이 제안한 AR-VLA 는 autoregressive Action Expert 로, 과거 동작 이력을 장기 메모리로 유지하며 refresh 가능한 vision-language prefix 를 조건으로 연속적인 동작 시퀀스를 생성합니다. 기존 VLA 나 diffusion policy 가 새 관측마다 temporal context 를 리셋하는 반면, 이 구조는 fast control 과 slow reasoning 간 주파수 불일치를 해소하고, re-anchoring mechanism 으로 perception 지연을 수학적으로 보정합니다. 시뮬레이션 및 실제 로봇 조작 태스크에서 SOTA reactive VLA 대비 성공률을 유지하거나 능가하면서도 더 부드러운 궤적을 보였고, 코드와 비디오가 공개되었습니다.
- #vla
- #action-generation
- #robotics
- #autoregressive
- #insait
Institute for Computer Science, Artificial intelligence and Technology