Papers·1개월 전
UniSHARP: 단일 이미지로 다양한 카메라 시스템에서 포토리얼리스틱 뷰 합성
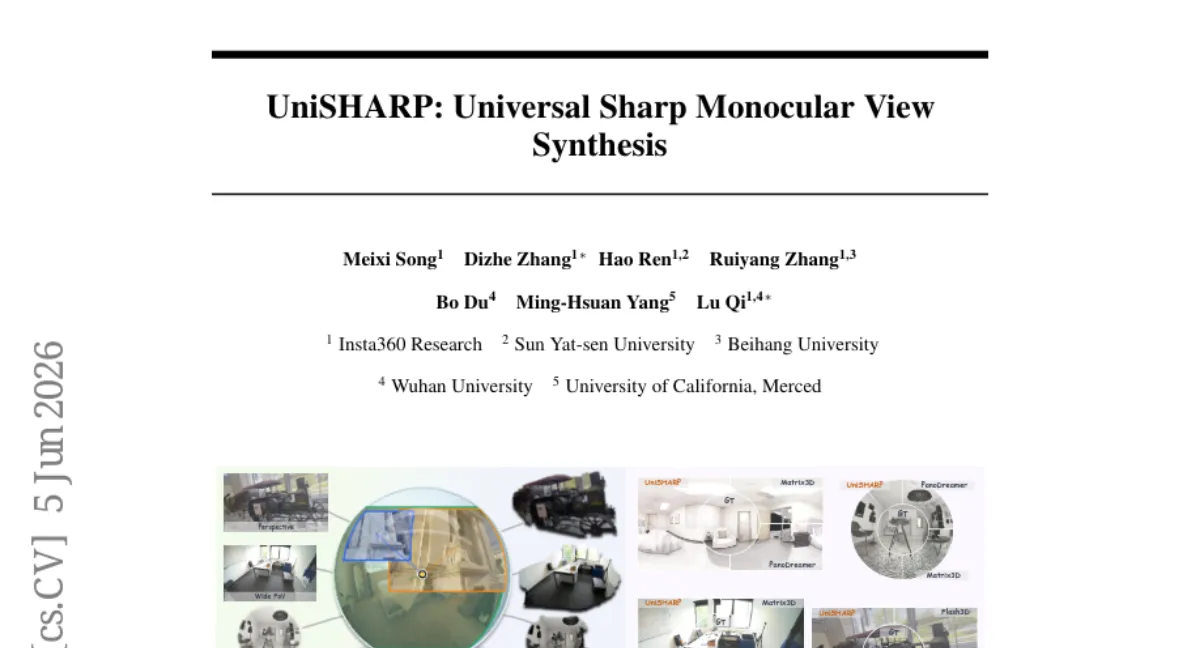
Insta360 연구팀이 SHARP를 확장한 UniSHARP를 제안, 단일 이미지로부터 일반 카메라, 광각, 어안, 파노라마까지 다양한 시야각에서 포토리얼리스틱 뷰를 합성합니다. 핵심은 이미지를 통합된 전방위 잠재 공간에 정렬하고, Gaussian 프리미티브를 광선 기반 표현으로 배치하는 방식입니다. 자체 구축한 다양한 FoV 벤치마크에서 기존 방법 대비 큰 폭으로 성능이 개선되었습니다.
Insta360 연구팀이 단일 이미지로 다양한 카메라 시스템(일반, 광각, 어안, 파노라마)에서 포토리얼리스틱 뷰를 합성하는 UniSHARP를 공개했습니다.
핵심 결론
- 태스크 — 단일 이미지 기반 universal monocular rendering — 다양한 시야각(FoV)의 카메라 시스템에서 새로운 시점의 포토리얼리스틱 이미지를 생성.
- 성능 — 자체 구축한 다양한 FoV 벤치마크에서 기존 방법(예: SHARP, PixelSplat) 대비 PSNR, SSIM, LPIPS 모두 큰 폭으로 개선.
방법
- 핵심 아이디어 — SHARP의 pinhole 가정을 극복하기 위해, 다양한 이미지를 통합된 전방위(omnidirectional) 잠재 공간에서 정렬.
- Gaussian 표현 — Gaussian 프리미티브를 광선(ray)과 방사 거리(radial distance) 기반의 광선 기반 표현으로 배치.
- 인코더 — UniK3D에서 영감을 받은 인코더로 2D 의미 및 3D 공간 특징을 추출, 이를 공동 디코딩하여 전체 Gaussian 클라우드를 생성.
한계·조건
- 벤치마크 — FoV별로 세분화된 자체 벤치마크에서 평가했으나, 실제 다양한 환경에서의 일반화 검증은 추가 필요.
- 코드 — 프로젝트 페이지(https://insta360-research-team.github.io/Unisharp-website/)에서 데모와 추가 정보 제공, 코드 공개 여부는 미정.
편집자 한 줄
단일 이미지로 다양한 카메라 시스템을 커버한다는 점이 실용적이네요. 다만 벤치마크가 자체 구축된 점은 감안할 필요가 있습니다.
- #view-synthesis
- #gaussian-splatting
- #omnidirectional
- #insta360
Meixi Song