Papers·1개월 전
상하이교통대, 가구 관절 부위 인식 위한 Geometric Primary Structure — VR로 1분 주석, 73% 조작 성공
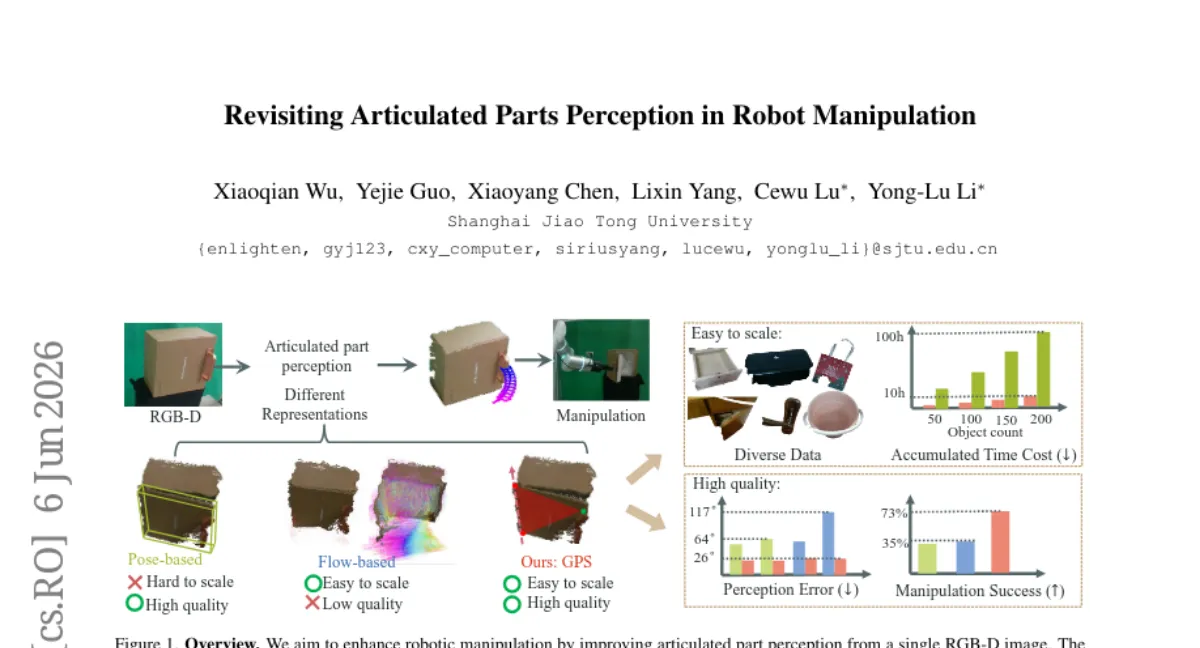
상하이교통대 연구팀이 articulated part 인식을 위한 새로운 표현법 Geometric Primary Structure(GPS)를 제안했습니다. VR 기기로 1분 만에 한 객체 시퀀스의 주석을 달 수 있는 VR-GPS 시스템으로 234개 객체·41K 프레임 데이터를 수집하고, 단일 RGB-D 이미지로 일반화 가능한 GPS 모델을 학습했습니다. 휴리스틱 정책과 결합해 9개 객체·270개 초기 상태에서 73% 성공률을 달성했으며, 별도의 in-domain fine-tuning 없이도 동작합니다. 다만 실험 대상이 9개 객체로 제한적이고, 실제 로봇 환경에서의 검증은 아직입니다.
상하이교통대가 가구의 관절 부위(문, 손잡이, 서랍 등)를 인식하는 새로운 표현법 Geometric Primary Structure(GPS)를 공개했습니다.
핵심 결론
- 태스크 — 단일 RGB-D 이미지로부터 articulated part의 기하학적 구조를 추정하는 GPS 모델.
- 성능 — 9개 객체·270개 초기 상태에서 휴리스틱 정책으로 73% 조작 성공률, in-domain fine-tuning 없이.
- 데이터 — VR-GPS 시스템으로 234개 객체·41K 프레임 수집, 6개 part class 포함.
방법
- GPS 표현 — 각 part의 기하학적 구조(예: 회전축, 이동 방향)를 추상화한 표현으로, pose 기반 방법보다 주석 비용이 낮고 affordance 기반 방법보다 품질이 높습니다.
- VR-GPS — 휴대용 VR 기기로 1분 만에 한 객체 시퀀스의 GPS 주석을 직접 부여할 수 있는 시스템.
- 모델 — 입력 RGB-D 이미지에서 GPS를 예측하는 일반화 가능한 네트워크를 학습.
한계·조건
- 객체 수 — 실험 객체가 9개로 제한적이며, 다양한 가구 유형에 대한 일반화 검증이 더 필요합니다.
- 환경 — 시뮬레이션 기반 평가로, 실제 로봇 환경에서의 성능은 추가 검증이 필요합니다.
- 코드·데이터 — GitHub에 코드, 데이터, VR 도구 모두 공개 예정.
편집자 한 줄
주석 효율과 일반화 가능성의 트레이드오프를 잘 해결한 접근입니다. 다만 9개 객체로는 실용성 판단이 이르니, 더 큰 스케일의 벤치마크 결과를 기다려볼 만합니다.
- #articulated-objects
- #rgb-d
- #vietnam
- #robotics
- #perception
Shanghai Jiao Tong University